


Aktuelles
2026-04-03
Vor dem Hintergrund der kontinuierlichen Weiterentwicklung von Fahrzeugüberwachungs- und intelligenten Systemen sind Lösungen, die ausschließlich auf Visual AI Perception basieren, nicht mehr in der Lage, die Anforderungen komplexer Anwendungsszenarien vollständig zu erfüllen. Insbesondere in typischen Einsatzbereichen wie Bergwerken, Baustellen, Häfen und im Logistiktransport – mit dynamischen Umweltbedingungen und komplexen Betriebsabläufen – steigen die Anforderungen an die Stabilität und Zuverlässigkeit von Wahrnehmungssystemen erheblich.
Als wichtiger Bestandteil des intelligenten Frontendsystems integriert STONKAM neben Visual AI Perception zusätzlich die Technologie der nichtvisuellen Wahrnehmung. Diese kann sowohl eigenständig als auch in Kombination mit Visual AI Perception Kameras eingesetzt werden, um durch Multisensorfusion eine umfassendere und robustere Umgebungswahrnehmung zu realisieren.
Eine Kamera für nichtvisuelle Wahrnehmung erfasst Umgebungsinformationen auf Basis nichtvisueller Daten. Zu den zentralen Produktformen zählen Radar-Kamera-Integrationseinheit, LiDAR, Wärmebildkamera, Millimeterwellenradar und digitales Ultraschallradar.
Diese Wahrnehmungsmethode ist nicht auf visuelle Bildinformationen angewiesen, sondern nutzt Parameter wie Entfernung, Temperatur und reflektierte Signale zur stabilen Objekterkennung. Dadurch wird die Anpassungsfähigkeit des Systems in komplexen Umgebungen deutlich verbessert.
Fahrzeugkameras auf Basis von Visual AI Perception ermöglichen eine intuitive visuelle Erfassung der Fahrzeugumgebung. In der Praxis ist Visual AI Perception jedoch kein universell einsetzbares System für alle Szenarien und weist unter bestimmten Bedingungen klare Einschränkungen auf:
● Nacht / Regen / Nebel / starkes Licht: Bei schlechten Lichtverhältnissen, Niederschlag oder starkem Gegenlicht nimmt die Bildqualität ab, was die Genauigkeit der Objekterkennung beeinträchtigt.
● Verdeckung / Staub / komplexe Einsatzbedingungen: In Umgebungen wie Bergwerken oder auf Baustellen können Staub, Hindernisse und komplexe Maschinenstrukturen das Sichtfeld der Kameras erheblich einschränken.
● Eingeschränkte Entfernungs- und Geschwindigkeitsbestimmung: Bildbasierte Berechnungen beruhen auf algorithmischen Schätzungen und unterliegen daher Einschränkungen hinsichtlich Genauigkeit und Reaktionsgeschwindigkeit.
Diese Herausforderungen verdeutlichen, dass Visual AI Perception allein keine zuverlässige Rund-um-die-Uhr-Abdeckung in allen Szenarien gewährleisten kann. Durch die Integration nichtvisueller Wahrnehmung kompensiert STONKAM diese Defizite gezielt und erweitert die Leistungsfähigkeit intelligenter Fahrzeug-Frontendsysteme erheblich.
Grundsätzlich unterscheiden sich nichtvisuelle Wahrnehmung und Visual AI Perception sowohl in ihrem Funktionsprinzip als auch in ihrem Anwendungsschwerpunkt: Während Visual AI Perception auf visuellen Daten basiert und den Fokus auf „Sehen und Verstehen“ legt, nutzt die nichtvisuelle Wahrnehmung physikalische Signale wie elektromagnetische Wellen, Infrarotstrahlung oder Schallwellen und konzentriert sich auf „Detektion und Messung“. Dadurch können hochpräzise Informationen zu Entfernung, Geschwindigkeit und räumlicher Position bereitgestellt werden.
Auch hinsichtlich der Umweltanpassungsfähigkeit bestehen deutliche Unterschiede: Visual AI Perception ist stark von Lichtverhältnissen abhängig und kann unter schwierigen Bedingungen wie Nacht, Regen oder Nebel an Leistungsfähigkeit verlieren. Nichtvisuelle Systeme hingegen arbeiten weitgehend unabhängig von Licht und liefern auch bei schlechter Sicht oder widrigen Wetterbedingungen stabile Ergebnisse.
Mit steigenden Anforderungen in der Praxis entwickelt sich die nichtvisuelle Wahrnehmung zunehmend zu einer zentralen Fähigkeit intelligenter Fahrzeugwahrnehmungssysteme und bildet eine zuverlässige technische Grundlage für Sicherheit und stabilen Betrieb in anspruchsvollen Umgebungen.
Der zentrale Mehrwert der nichtvisuellen Wahrnehmung liegt in der Überwindung der „Unsichtbarkeit“ und „Unzuverlässigkeit“ visueller Systeme unter schwierigen Bedingungen. Dies zeigt sich insbesondere in folgenden Aspekten:
● Kontinuierliche Umgebungswahrnehmung unabhängig von Lichtverhältnissen
● Stabile Detektionsleistung trotz Störeinflüssen wie Regen, Nebel oder Staub
● Hochpräzise Messung von Entfernungen und Geschwindigkeiten
● Aufbau mehrdimensionaler Warnmechanismen zur schnelleren und zuverlässigeren Risikoreaktion
In den Fahrzeuglösungen von STONKAM stellt die nichtvisuelle Wahrnehmung eine Schlüsseltechnologie dar, die Stabilität und Zuverlässigkeit in komplexen Einsatzbedingungen deutlich verbessert. Dadurch entwickelt sich die Fahrzeugüberwachung von einer rein visuellen Datengrundlage hin zu einem präziseren und robuster anpassbaren multisensorischen Wahrnehmungssystem.
Zur Abdeckung unterschiedlicher Anwendungsszenarien hat STONKAM ein umfassendes Portfolio nichtvisueller Wahrnehmungslösungen entwickelt:
● RadarKamera
Kombiniert die stabilen Detektionsfähigkeiten eines 77-GHz-Millimeterwellenradars mit den visuellen Vorteilen eines Kamerasystems und ermöglicht eine ganzjährige, mehrdimensionale Objekterfassung. Hohe Zuverlässigkeit auch bei schlechten Lichtverhältnissen oder Verdeckungen. Geeignet für Muldenkipper, Gabelstapler, Lkw sowie weitere Bau- und Nutzfahrzeuge.
● LiDAR
Ermöglicht hochpräzise Distanzmessung sowie dreidimensionale Objekterkennung. Eingesetzt zur Reduzierung von toten Winkeln, zur Kollisionsvermeidung und zur Positionsbestimmung in Hafenfahrzeugen, Umschlaganlagen und automatisierten Systemen.
● Wärmebildkamera
Kombiniert Wärmebild- und sichtbare Lichttechnik und verfügt über integrierte KI-Algorithmen zur Erkennung von Personen und Fahrzeugen. Unterstützt verschiedene Anzeigemodi und arbeitet zuverlässig unter schwierigen Bedingungen wie Staub, Nebel, schlechter Nachtbeleuchtung oder Blendung.
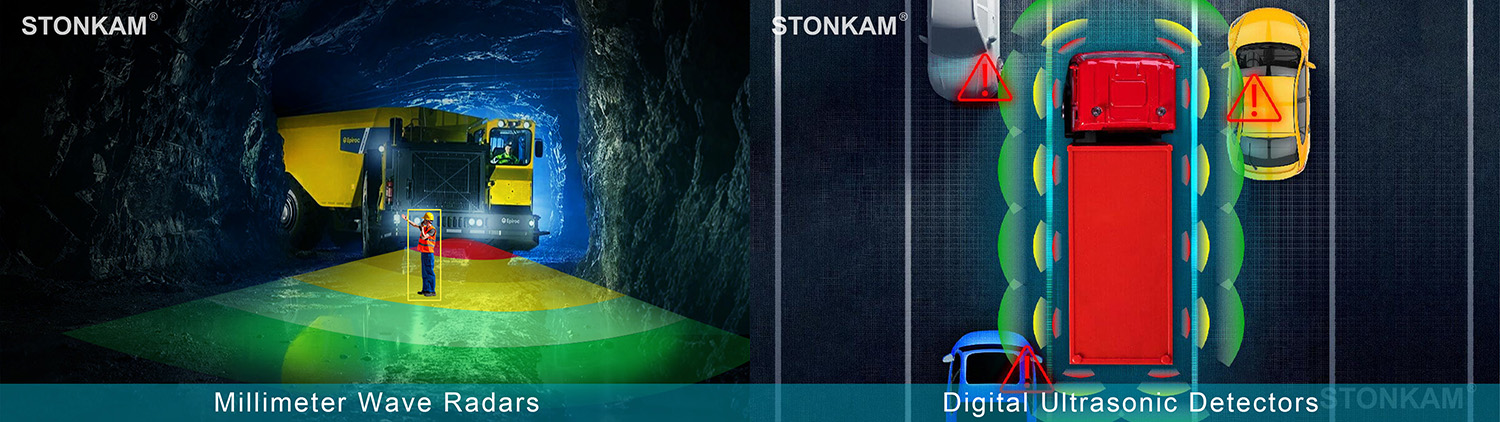
● Millimeterwellenradar
Geeignet für die Erkennung von Objekten im Nah- bis Mitteldistanzbereich, mit hoher Störfestigkeit. Unterstützt den Fahrer durch visuelle und akustische Warnsignale zur Vermeidung potenzieller Gefahren.
● Ultraschalldetektors
Dient der Objekterkennung im Nahbereich und eignet sich besonders für Kollisionsvermeidung bei niedrigen Geschwindigkeiten und in beengten Arbeitsumgebungen.


Durch die Integration nichtvisueller Wahrnehmung steigert das Fahrzeugüberwachungssystem von STONKAM seinen Nutzen in verschiedenen Anwendungsszenarien deutlich:
● Im Bergbau und bei Baumaschinen: Verbesserung der Wahrnehmung trotz Staub und komplexer Umgebung, Reduzierung von Unfallrisiken
● In Logistik und Transport: Erhöhung der Fahrsicherheit bei Nacht und unter schwierigen Wetterbedingungen
● In Hafen- und Schwerlastanwendungen: Erweiterte Umgebungswahrnehmung zur Minimierung von Risiken durch tote Winkel
● Im öffentlichen Verkehr: Verbesserte Erkennung von Fußgängern und nicht motorisierten Verkehrsteilnehmern
Insgesamt trägt dies sowohl zur Optimierung des Sicherheitsmanagements als auch zur Senkung von Betriebskosten und Steigerung der Effizienz bei.
Mit der Weiterentwicklung intelligenter Fahrzeugtechnologien entwickelt sich die nichtvisuelle Wahrnehmung zunehmend von einer unterstützenden Funktion zu einer zentralen Schlüsseltechnologie. Zukünftig wird durch leistungsfähigere Algorithmen und fortschrittliches Edge Computing eine noch tiefere Integration multisensorischer Systeme erreicht, wodurch die Lösungen von STONKAM ein höheres Maß an Intelligenz erreichen.
Dabei wird die nichtvisuelle Wahrnehmung in enger Synergie mit Visual AI Perception weiterentwickelt und gemeinsam eine wirklich umfassende Sicherheitslösung für unterschiedlichste Anwendungsszenarien schaffen.
F1: Was ist eine Kamera für nichtvisuelle Wahrnehmung?
Nichtvisuelle Wahrnehmung beschreibt eine Methode zur Erfassung von Umgebungsinformationen mittels Sensoren wie Fahrzeugradar, LiDAR, Infrarot- oder Ultraschallsystemen. Sie basiert nicht auf visueller Bilderkennung, sondern auf der Analyse von Distanz-, Geschwindigkeits- und Signalsdaten.
F2: Warum benötigen Fahrzeugüberwachungssysteme nichtvisuelle Wahrnehmung?
Da Visual AI Perception stark von Licht- und Wetterbedingungen beeinflusst wird, bietet die nichtvisuelle Wahrnehmung eine stabilere und robustere Ergänzung für den zuverlässigen 24/7-Betrieb.
F3: Welche Kernprobleme löst die nichtvisuelle Wahrnehmung von STONKAM?
Sie verbessert die Erkennungsstabilität bei schlechter Sicht, liefert präzisere Messdaten, reduziert Fehlalarme und erhöht die Zuverlässigkeit der Risikobewertung.
F4: Welche typischen Geräte umfassen die nichtvisuellen Wahrnehmungslösungen von STONKAM?
Zu den typischen Komponenten gehören Fahrzeugradar (z. B. Millimeterwellenradar), LiDAR, Wärmebildkameras, digitales Ultraschallradar sowie Radar-Kamera-Integrationseinheiten.
F5: Wie wählt man die passende nichtvisuelle Wahrnehmungslösung von STONKAM aus?
Die Auswahl sollte auf Basis von Anwendungsszenario, Umgebungsbedingungen und funktionalen Anforderungen erfolgen, unter Berücksichtigung von Systemkompatibilität, Skalierbarkeit sowie Kosten-Nutzen-Verhältnis.
STONKAM CO., LTD
Adresse: 1/F.,#6Building,Huangzhou Industrial Park, Chebei Rd.,Tianhe,510660 Guangzhou,China
Tel: (86-20)6667 0988
Fax: (86-20)6667 0977
E-mail: sales@stonkam.com
WhatsApp: +86 15521270579; +86 15708917305

Copyright ©2002-2022 STONKAM CO.,LTD. 广州敏视数码科技有限公司 ALL Rights Reserved. 广东省通信管理局 粤ICP备05043268号





 AI
AI  AIoT
AIoT  360° Rundumsicht-Systems
360° Rundumsicht-Systems  Erkennungssensors
Erkennungssensors  Hochauflösende Monitores
Hochauflösende Monitores  Analog Kameras
Analog Kameras  Digitale Kameras
Digitale Kameras  CMS
CMS  AI Drahtlos
AI Drahtlos  Regelungen
Regelungen  Wärmebildkameras
Wärmebildkameras  OEM-Lösungen
OEM-Lösungen  Industrieanwendungen
Industrieanwendungen
 Erfolgsgeschichten
Erfolgsgeschichten  Aktuelles
Aktuelles
 Videozentrum
Videozentrum
 Einführung
Einführung  Warum STONKAM®
Warum STONKAM®  Kultur
Kultur  Meilenstein
Meilenstein  Zertifikate
Zertifikate  Kontakt
Kontakt  Unterstützung
Unterstützung 




















